AI 로봇이 철도 선로 스스로 점검한다
디지털 트윈·피지컬 AI 결합해 예방형 유지보수 구현
인공지능(AI)과 로봇이 철도 선로를 스스로 점검하는 시대가 열린다. 철도 시설물을 가상공간에서 학습한 자율 점검 로봇이 실제 선로 현장에서 위험 요소를 찾아내는 기술 개발이 본격화된다.
한국철도기술연구원은 디지털 트윈과 피지컬 AI를 결합한 '철도 특화 로봇 기반 선로점검 핵심기술 개발' 연구에 착수했다고 22일 밝혔다.
이번 연구의 핵심은 실제 철도 환경을 그대로 구현한 디지털 트윈을 로봇의 학습장으로 활용하는 것이다. 로봇은 가상공간에서 다양한 위험 상황과 환경 변화를 반복적으로 학습한 뒤 실제 선로 현장에 투입된다.
철도 선로 점검은 작업자 안전 문제와 희귀 결함 데이터 부족이라는 한계를 안고 있다. 실제 사고나 결함 사례가 많지 않아 AI 학습용 데이터를 확보하기 어렵고, 위험 상황을 현장에서 반복 실험하는 것도 사실상 불가능하다.
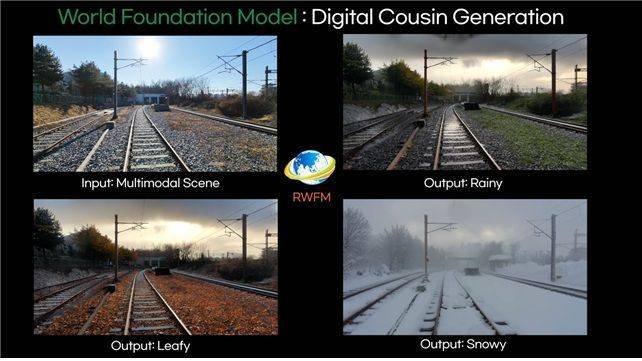
이에 연구진은 드론과 카메라, 라이다(LiDAR) 등을 활용해 실제 선로와 주변 환경을 3차원 가상공간으로 구축할 계획이다. 이 공간에서 로봇은 선로 침입이나 장애물 발생, 폭설·폭우, 야간·역광 환경 등 다양한 상황을 경험하며 시각 인지와 이동 제어 능력을 학습하게 된다.
가상공간에서 훈련하고 실제 선로에서 점검
연구진은 가상공간에서 학습한 데이터를 실제 로봇에 적용하고, 현장에서 수집한 데이터를 다시 학습에 반영하는 방식으로 성능을 지속적으로 고도화할 예정이다.
특히 이번 연구에는 최근 주목받고 있는 피지컬 AI 기술이 적용된다. 피지컬 AI는 AI가 현실 세계를 인식하고 스스로 판단해 물리적 행동까지 수행하는 기술이다.
철도연은 월드 파운데이션 모델을 활용해 로봇의 시각 인지 능력을 높이고, 강화학습과 시뮬레이션-현실 전이(Sim2Real) 기술을 통해 실제 선로 환경에서도 안정적으로 이동할 수 있는 제어 기술을 확보한다는 계획이다.
연구가 성공하면 철도 유지보수 체계도 크게 달라질 전망이다. 현재의 사후 대응 중심 점검 방식에서 벗어나 위험 요소를 사전에 발견하는 예방형·자율형 유지보수 체계 구축이 가능해진다. 작업자의 선로 출입을 줄여 안전성을 높이고 점검 품질의 편차도 최소화할 수 있을 것으로 기대된다.
이번 연구는 국가과학기술연구회(NST) 기본사업으로 추진되며 2028년까지 3년간 수행된다.
연구책임자인 변성준 철도연 선임연구원은 "자율 점검 로봇의 성능은 얼마나 정확하게 보고 얼마나 안정적으로 움직이느냐에 달려 있다"며 "월드 파운데이션 모델과 강화학습을 통해 실제 철도 현장에서도 활용 가능한 자율 점검 기술을 확보하는 것이 목표"라고 말했다.
사공명 철도연 원장은 "앞으로 철도 유지보수는 위험을 사전에 발견하고 작업자의 안전을 확보하는 예방적·자율적 체계로 전환돼야 한다"며 "피지컬 AI와 로봇 기술을 활용해 국민이 안심하고 이용할 수 있는 철도 안전 기술 개발에 최선을 다하겠다"고 전했다.
김종화 기자 justin@asiae.co.kr
Copyright © 아시아경제. 무단전재 및 재배포 금지.
- '36만 팔로워' 한국인, 태국女들과 성관계 영상 SNS에 올리더니 현지서 체포
- '262표차 당선' 신임 시장 숨진채 발견…음모론까지 확산, 일본에 무슨 일이
- 샌드위치에 침 뱉은 직원…손님 "헤르페스 바이러스 감염" 소송전
- 교내서 남고생들과 성관계 가진 20대 女교사, '협박 피해자'였다…美학교 '발칵'
- "나 사실" 임신 17주차, 예비신랑의 폭탄 고백…'위장 독신' 日 사회 흔든다
- "사람 절대 못 뽑아요"…알바생보다 못 버는 사장님, 34%가 한 달 215만원도 못 쥐어
- "일주일 치 점심값 50만원 독박"…신입사원 퇴사 부른 회사 문화
- "우리가 당할 줄은 몰랐다"…평생 모은 15억 날릴 뻔한 노부부
- "둘째는 한국서 낳는다" 안영미, 원정출산 의혹에 즉각 선 그은 이유 보니
- "저 언니 3개월마다 와서 쓸어가잖아"…올영 세일 맞춰 한국 들어오는 외국인 '폭증'