명현 KAIST 교수 연구팀, 로보틱스·컴퓨터비전 국제챌린지 석권

KAIST 연구팀이 세계 로보틱스·컴퓨터비전 학술대회에서 열린 국제 챌린지에서 잇달아 우승하며 공간인지 기술 경쟁력을 입증했다.
KAIST는 명현 전기및전자공학부 교수 연구실 소속 'ACDC-K팀'과 'Curaytor팀'이 국제 로봇·자동화 학술대회(ICRA 2026)와 컴퓨터비전·패턴인식학술대회(CVPR 2026) 워크숍에서 열린 국제 챌린지에서 각각 1위를 차지했다고 19일 밝혔다.

ACDC-K팀은 지난 1~5일 오스트리아 비엔나에서 열린 ICRA 2026의 OCRAIM 워크숍 '힐티X트림블 SLAM 챌린지 2026'의 'SLAM' 부문에 참가해 60여 개 팀 가운데 1위를 차지했다. SLAM은 '동시 위치추정 및 지도작성'을 의미한다.
리히텐슈타인 전동 공구 제조 기업 '힐티', 미국 위치정보기술 기업 '트림블', 영국 옥스퍼드대가 공동 주관한 이번 챌린지는 실제 건설 현장에서 수집한 센서 데이터를 활용해 로봇의 위치를 추정하고 주변 환경 지도를 생성하는 성능을 평가하는 국제 대회다.
연구팀은 전방·후방 어안 카메라와 가속도·각속도 등을 측정하는 관성센서(IMU) 데이터를 융합한 독자적인 SLAM 기술을 개발했다. 카메라 영상 속 특징점·선 정보를 활용하고 환경 변화에 따라 제약·보정 모델을 적용했다. 그 결과 복잡한 건설 환경에서도 안정적인 위치 추정·지도 작성 성능을 구현해 대회 최고 성적을 거뒀다.
Curaytor팀은 3~7일 미국 덴버에서 열린 CVPR 2026의 CV4AEC 워크숍 'NSS 챌린지 2026'에서 8개 출전팀 가운데 1위를 차지했다. 미국 스탠퍼드대·스위스 취리히 연방공대·미국 오리건주립대가 공동 주관한 NSS 챌린지는 시간에 따라 변화하는 건설·산업 환경에서 '포인트 클라우드 정합 기술'을 평가하는 국제 대회다.
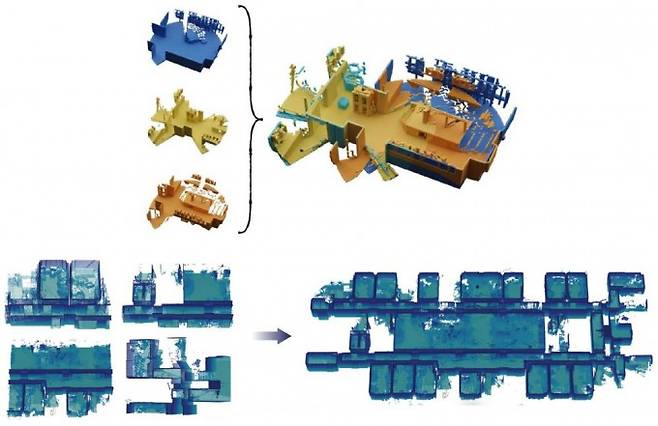
'포인트 클라우드'는 공간을 점들의 집합으로 표현한 3차원 데이터다. 서로 다른 시점에서 획득한 데이터를 동일한 좌표계로 맞추는 과정을 '정합'이라고 한다.
연구팀은 서로 다른 시점과 장소에서 수집한 다수의 '라이다(LiDAR)' 데이터를 정합하는 기술을 개발했다. 라이다는 레이저를 이용해 주변 환경의 거리와 형상을 측정하는 센서다. 특징점 요약·대응점 추정·정합 신뢰도 판단 등 여러 기술을 통합해 구조가 변하고 움직이는 객체가 존재하는 환경에서도 안정적인 정합 성능을 구현했다.
명현 교수는 "우리 연구실 기술이 실제 건설·산업 환경처럼 복잡하고 변화가 많은 상황에서도 우수하게 작동한다는 것을 입증했다"며 "학생들이 세계적인 연구진과 경쟁하는 국제 챌린지에서 최고 성능을 기록했다는 점에서 의미가 크다"고 말했다.
명현 교수 연구실은 힐티 SLAM 챌린지에서 2023년 라이다 부문 전체 1위와 비전 부문 학계 1위를 기록한 바 있다. NSS 챌린지에서는 2025년에 이어 올해도 우승을 차지해 2년 연속 정상에 올랐다. 로보틱스와 컴퓨터비전 분야를 아우르는 공간인지 기술 연구 역량을 국제적으로 인정받고 있다는 평가다.
[문혜원 기자 moony@donga.com]
Copyright © 동아사이언스. 무단전재 및 재배포 금지.