줄자처럼 말아서 보관했다가 필요할 때 '쑥'…견고한 로봇 팔
전체 맥락을 이해하기 위해서는 본문 보기를 권장합니다.
국내 연구팀이 줄자처럼 말아서 효율적으로 수납했다가 필요할 때 전개할 수 있는 튼튼한 로봇 팔 구조를 개발했다.
연구팀은 "팔 달린 가사 로봇으로 확장하거나 로봇이 스스로 건축물을 세우고 이동하는 미래 건설 시스템의 가능성도 연 것"이라며 "연구성과는 작은 부피로 보관되면서도 전개 시에는 높은 작업 하중을 견딜 수 있는 구조가 필요한 경우 도움이 된다"고 밝혔다.
이 글자크기로 변경됩니다.
(예시) 가장 빠른 뉴스가 있고 다양한 정보, 쌍방향 소통이 숨쉬는 다음뉴스를 만나보세요. 다음뉴스는 국내외 주요이슈와 실시간 속보, 문화생활 및 다양한 분야의 뉴스를 입체적으로 전달하고 있습니다.
국내 연구팀이 줄자처럼 말아서 효율적으로 수납했다가 필요할 때 전개할 수 있는 튼튼한 로봇 팔 구조를 개발했다. 로봇의 작업 범위와 성능을 향상해 일상적인 가사 노동이나 건설 작업 등에 유용할 것으로 기대된다.
조규진 서울대 기계공학부 교수팀은 종이접기와 꼬임 원리를 활용해 줄자처럼 부드럽게 접고 말아둘 수 있는 전개형 로봇 구조물 '포로게이티드-스트럭쳐(FoRoGated-Structure)'를 개발하고 연구결과를 26일(현지시간) 국제학술지 '사이언스 로보틱스'에 공개했다.
줄자처럼 구조체를 중심부에 돌돌 말아 보관하는 롤링 방식은 전체 장치를 공간 효율적으로 보관할 수 있다는 장점이 있다. 보관 단계에서는 중심축인 허브에 부드럽게 감기기 위해서 평평한 단면으로, 전개 시에는 길어진 구조가 처지는 것을 막기 위해 주름진 단면으로 형상이 전환된다. 평평한 종이는 유연하지만 지그재그로 접어 주름을 만들면 잘 휘어지지 않는 원리다.

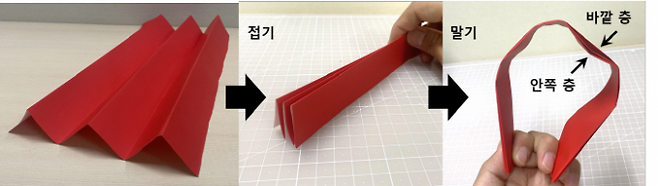
일반적인 주름 구조를 겹겹이 접어 허브에 감으면 재료의 두께 때문에 중심에 가까운 안쪽과 바깥쪽 층의 둘레 차이가 발생하며 찌그러짐 또는 구김이 생긴다. 이 때문에 주름을 펼쳐 1개 층으로 감는 것이 일반적이지만 주름 단면이 크고 길어져 강도가 증가할수록 보관할 때도 필요한 공간이 커지는 제약이 있다.
연구팀은 주름 구조에 '인터레이싱(interlacing)' 원리를 도입했다. 구성 요소를 접착하고 고정시키는 게 아니라 서로 교차시키고 맞물리도록 설계해 서로 틈새로 미끄러지도록 하는 전략이다. 구성요소 사이에는 재배열이 가능하지만 포개져 있는 방향으로는 서로 지탱하며 하중을 견딜 수 있다.
연구팀은 평행하게 배열된 금속 판을 서로 붙이지 않고 리본으로 촘촘히 엮어 고리 형태로 만들었다. 튼튼한 접이식 주름 구조를 만들면서도 틈새로 미끄러질 수 있어 허브에 부드럽게 말려 감긴다.
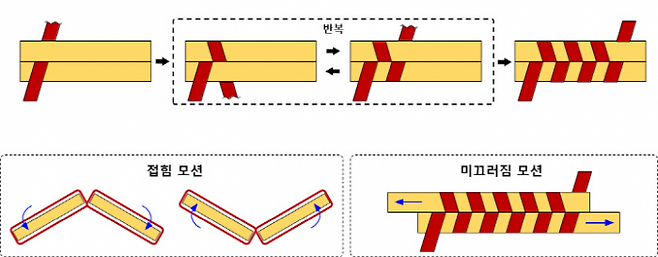
연구팀은 "리본으로 엮는 방식을 통해 아무리 주름이 많은 구조라도 겹겹이 접어 부드럽게 말아 보관할 수 있다"고 설명했다.
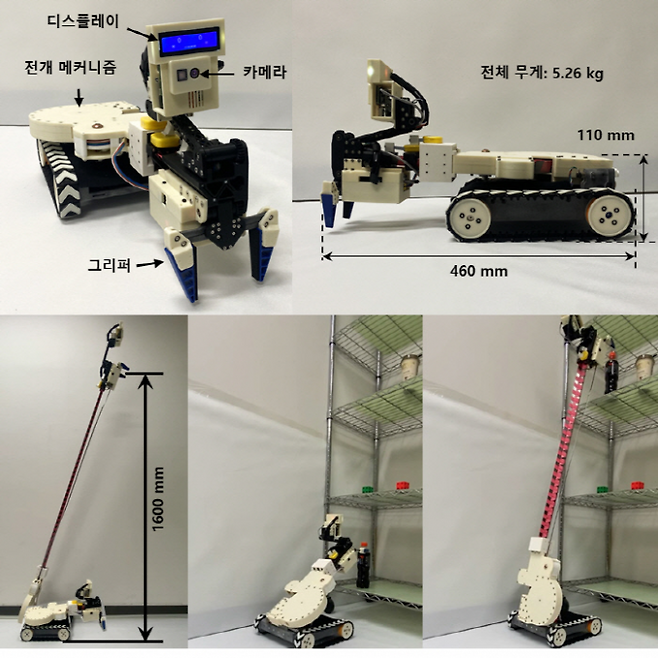
연구팀은 개발된 구조체를 모터 하나로 구동되는 로봇팔에 적용했다. 로봇 청소기 크기의 이동형 로봇에 적용하자 평소에는 바닥에서 낮게 이동하다가 팔을 뻗어 선반 정리, 엘리베이터 버튼 누름 등의 작업을 수행했다.
다른 시연에서는 이동형 로봇 3개를 목표 위치로 이동시킨 뒤 팔을 뻗어 밑변 3.2m, 높이 3.4m의 정삼각뿔 모양으로 전개했다. 이후 위쪽 꼭짓점부터 높이 약 2.5m의 구조물을 출력하는 모바일 3차원(3D) 프린팅 로봇을 구현했다.
연구팀은 "팔 달린 가사 로봇으로 확장하거나 로봇이 스스로 건축물을 세우고 이동하는 미래 건설 시스템의 가능성도 연 것"이라며 "연구성과는 작은 부피로 보관되면서도 전개 시에는 높은 작업 하중을 견딜 수 있는 구조가 필요한 경우 도움이 된다"고 밝혔다.
연구 주저자인 정순필 서울대 박사후연구원과 송재영 HD한국조선해양 연구원은 "접고 말아 보관하는 이중 압축 방식으로 콤팩트한 보관이 가능하면서도, 전개 시 촘촘한 엮임으로 높은 강도를 확보하는 종이접기 구조를 구현했다"고 설명했다.
조 교수는 "사람들이 종종 휴머노이드라는 한 가지 형태에서만 해법을 기대하곤 하는데 현장의 많은 문제는 환경과 과업에 따라 달라진다"며 "형태를 바꾸어 필요에 따라 전개되는 로봇이 피지컬 인공지능(AI)의 실용 플랫폼이 될 수 있음을 보여준다"고 말했다.
<참고 자료>
- doi.org/10.1126/scirobotics.adv4696

[이병구 기자 2bottle9@donga.com]
Copyright © 동아사이언스. 무단전재 및 재배포 금지.