화성 동굴에 생명체 흔적 있을까… 거미 닮은 로봇이 밝힌다
전체 맥락을 이해하기 위해서는 본문 보기를 권장합니다.
동굴은 사람이나 동물이 드나들 수 있을 크기로 암석에 둘러싸여 뚫려있는 지형을 말한다.
달과 화성의 동굴은 우주 방사선과 극심한 온도 변화로부터 생명체를 보호할 수 있는 곳으로 꼽힌다.
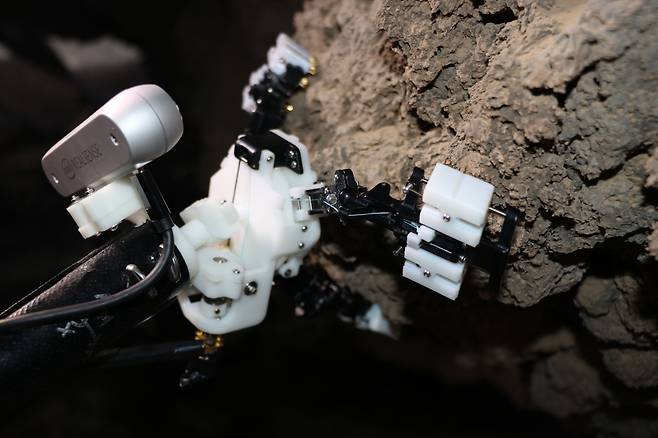
로봇의 내부 힘을 제어해 활대에 장력을 유지하고, 그 힘으로 암석에 안정적으로 매달릴 수 있다.
로봇이 동굴 옆면과 윗면을 이동하기 위해선 그리퍼로 잡을 수 있는 암석의 볼록한 부분을 파악해야 한다.
이 글자크기로 변경됩니다.
(예시) 가장 빠른 뉴스가 있고 다양한 정보, 쌍방향 소통이 숨쉬는 다음뉴스를 만나보세요. 다음뉴스는 국내외 주요이슈와 실시간 속보, 문화생활 및 다양한 분야의 뉴스를 입체적으로 전달하고 있습니다.
주변 지형 파악해 암석 잡고 동굴 이동
화성 동굴에서 생명체 흔적 발견 목표

동굴은 사람이나 동물이 드나들 수 있을 크기로 암석에 둘러싸여 뚫려있는 지형을 말한다. 자연적으로 만들어져 종종 지하 깊숙이 형성되기도 한다. 길게는 수만 년 동안 만들어지고 사람의 손길이 닿지 않아 자연환경이 잘 보존된 경우가 많다. 태양 빛이 닿지 않아 어둡고 먹이가 적은 환경에 맞춰 동굴 생태계가 만들어진다.
우주에서도 마찬가지다. 달과 화성처럼 지구 밖 행성에도 동굴이 존재한다. 달과 화성의 동굴은 우주 방사선과 극심한 온도 변화로부터 생명체를 보호할 수 있는 곳으로 꼽힌다. 달과 화성의 동굴에 과거나 현재에 생명체가 존재했을 가능성이 크다는 이야기다. 미 항공우주국(NASA)은 화성에 1000개 정도의 동굴이 있을 것으로 추정하고 있다.
우주에서 동굴을 탐험하기 위한 거미를 닮은 전용 로봇이 개발됐다. 마르코 파보네(Marco Pavone) 미국 스탠퍼드대 항공우주학과 교수 연구팀은 우주 탐사에 활용될 소형 로봇 ‘리치봇(ReachBot)’을 개발한 내용을 국제 학술지 ‘사이언스 로보틱스(Science Robotics)’에 18일 발표했다.
리치봇은 거미를 모방해 만든 로봇으로, 동굴 탐험에 특화됐다. 리치봇은 활대(Boom) 끝에 암석을 쥘 수 있는 그리퍼가 달린 형태의 다리를 여러 개 갖는다. 로봇의 내부 힘을 제어해 활대에 장력을 유지하고, 그 힘으로 암석에 안정적으로 매달릴 수 있다. 이 덕분에 동굴 바닥뿐 아니라 옆면과 윗면을 자유롭게 탐사할 수 있다. 기존에 사족보행이나 바퀴로 움직이는 로봇과 달리 동굴에 대한 전반적인 조사가 가능하다.

리치봇은 암석을 잡으며 동굴을 자유롭게 누비기 위해 카메라 센서를 사용한다. 로봇이 동굴 옆면과 윗면을 이동하기 위해선 그리퍼로 잡을 수 있는 암석의 볼록한 부분을 파악해야 한다. 카메라로 주변에 볼록한 암석을 찾은 후 인공지능(AI) 알고리즘을 통해 필요한 활대의 장력과 그리퍼의 악력을 결정한다.
연구팀은 새로 개발한 리치봇의 성능을 시험하기 위해 미국 캘리포니아주 모하비 사막에 있는 동굴에서 현장 실험을 진행했다. 이번 실험에서는 로봇을 구성하는 여러 개의 다리 중 한 개만 사용했다. 다리 한 개만 이용했을 때 로봇이 지형을 인식하고 암석을 제대로 잡는지 확인하기 위해서다.
연구팀은 리치봇의 현장 테스트를 성공적으로 평가했다. 앞서 스탠퍼드대 연구진은 지난해 2월 리치봇을 처음 공개했다. 당시에는 단순히 상자에 줄자와 그리퍼를 달아 개념을 선보인 정도였다. 리치봇의 개념을 처음 발표한 지 1년 정도 만에 기하학을 기반으로 표적 지점을 식별하는 단계에 이른 것이다.
다만 로봇이 그리퍼의 악력과 활대 장력을 적정한 수준으로 조절하지 못하면 파괴될 수 있다. 연구팀은 이번 현장 실험 데이터를 중심으로 후속 연구에 돌입할 계획이다. 연구팀은 “현장 실험 결과, 로봇 그리퍼의 최대 악력 예측과 주변 지형에서 볼록한 암석 특징을 식별하는 것이 더 개선돼야 한다”며 “로봇의 움직임을 설정하고 지형을 인식하는 모델에도 많은 과제가 남아 있다”고 설명했다.
참고자료
Science Robotics, DOI: https://doi.org/10.1126/scirobotics.adi9762
arXiv, DOI: https://doi.org/10.48550/arXiv.2110.10829
- Copyright ⓒ 조선비즈 & Chosun.com -
Copyright © 조선비즈. 무단전재 및 재배포 금지.
- [단독] ‘한국형 화물창’ SK해운 LNG선, 한 번도 못 쓰고 폐선
- 발표하다 울어버린 서울대병원 전공의…“국민 위했는데, 공공의 적 돼 버려”
- 한화에어로스페이스, 1분기 영업익 374억원… 전년比 83%↓
- 기아, 전기 택시 ‘니로 플러스’ 10월에 생산 중단
- ‘4천억 M&A 신화’ 한섬 정재봉... ‘경업금지’ 족쇄 풀리자 12년 만에 패션 대표로 컴백
- 오영실 “4년 만에 7억원 빚 갚으니 갑상선암 걸려 투병”
- 작곡 사기에 성희롱 의혹까지… 유재환, 잇단 논란에 게시물 싹 지웠다
- 청년이 10만원, 정부가 10만원…청년내일저축계좌 모집
- 3월까지 국세, 전년보다 2.2兆 덜 걷혀… “법인세 타격 컸다”
- 한전, 6월 희망퇴직 실시…입사 4년차부터 대상