3m 높이서 떨어져도 고양이처럼 사~뿐하게 네발로 착지하는 로봇개
이 기사는 언론사에 의해 수정되어 본문과 댓글 내용이 다를 수 있습니다.

네발로 이동하는 로봇개가 높은 곳에서 떨어져도 고양이처럼 안전하게 착지할 수 있는 기술을 배웠다. 사람이 가기 힘든 곳에서 작업을 하는 로봇개는 늘 추락할 위험이 있었지만 별다른 안전장치가 없었다.
미국 노터데임대의 하이 린 교수 연구진은 최근 논문 사전 공개 사이트인 아카이브에 “미니 치타 로봇이 3m 높이에서 떨어뜨려도 안전하게 네 발로 착지하는 데 성공했다”고 밝혔다.
미니 치타는 네이버랩스의 기술고문인 미국 매사추세츠공대(MIT) 김상배 교수가 개발한 로봇개로, 30㎝ 키에 무게가 9㎏이다. 로봇개 중 가장 빠르고 뒤공중제비도 처음 성공했지만 높은 곳에서 떨어지면 속수무책이었다.
연구진은 고양이가 공중에서 몸을 뒤틀어 늘 네발로 착지하는 것을 모방하기로 했다. 하지만 짧은 추락 시간에 착지에 적합한 자세를 계산하기는 불가능했다. 연구진은 인공지능에 컴퓨터 가상시험(시뮬레이션) 결과를 반복 학습시켜 낙하 시 첫 자세를 알면 복잡한 계산을 하지 않고 바로 필요한 자세를 알 수 있게 했다.
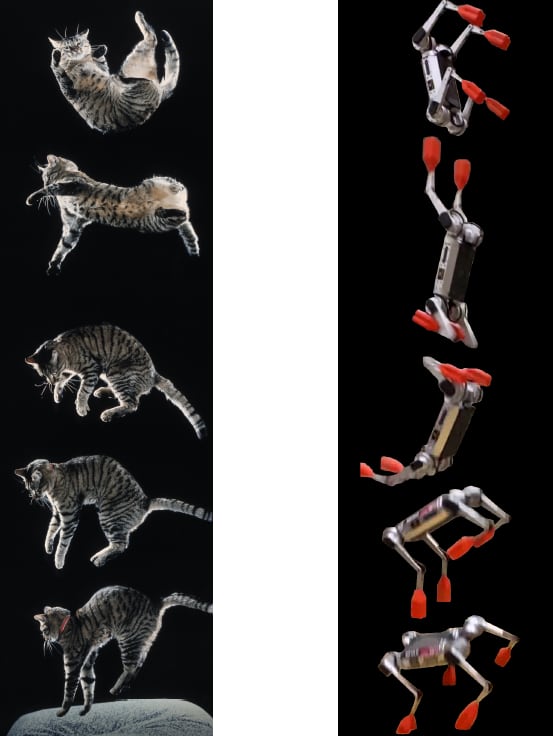
또 로봇개의 발에 동전이 들어간 신발을 신겨 적당한 무게도 추가했다. 로봇이 떨어질 때 다리가 무거울수록 반대로 향하는 몸통에 그만큼 더 큰 힘을 줄 수 있다. 덕분에 다리를 움직여 몸통의 자세를 원하는 대로 잡을 수 있다. 전문가들은 이번 연구가 중력이 약한 우주에서 로봇개가 도약과 착지를 반복하며 이동하는 데 도움을 줄 수 있다고 기대했다.
Copyright © 조선일보. 무단전재 및 재배포 금지.
- 전자발찌 착용 40대에 살해당한 여성… 가정폭력·스토킹 당했다
- 靑, 北 탄도미사일 발사에 “도발 행위, 즉각 중단할 것을 촉구”
- 국군 800명은 왜 北으로 갔나 ‘국군 2개 대대 월북 사건’ [호준석의 역사전쟁]
- [오늘의 운세] 3월 15일 일요일 (음력 1월 27일 戊子)
- 이란 전쟁 속 한일 공급망 협력 강화… LNG 협력 강화
- ‘미녀 삼총사’ 유명 배우 아들, 살인미수 재판에...이마엔 악마 뿔
- 日 다카이치 “방위력 강화 위해 모든 선택지 검토”
- 80대 사망 무면허 뺑소니범, 도주 하루 만에 검거
- “나도 좋았다” 女 녹취록 공개… 배우 한지상, 성추행 의혹 해명
- 삼성디스플레이 노사, 올해 임금 인상률 6.2% 잠정 합의