[프리미엄 리포트] 한국 로봇 개발의 현장에 가다

“아시모(ASIMO)가 세상에 등장한 순간 망치로 머리를 한 대 맞은 것 같았죠.”
휴머노이드로봇연구센터장인 오준호 KAIST 기계공학과 교수는 한국 인간형 로봇(휴머노이드)의 최고봉으로 꼽히는 휴보(HUBO)를 개발한 계기가 일본이 출시한 아시모 때문이었다고 회상했다. 2002년부터 로봇 연구에 매진해온 그는 한국의 1세대 로봇 공학자다.
일본 ‘아시모’ 대적할 ‘휴보’ 개발
2000년대 이전에 개발된 휴머노이드는 거대한 쇳덩어리였다. 대부분 중심을 잡는 기능이 전부였다. 그런데 2000년 일본의 자동차 회사 혼다가 공개한 아시모는 인간처럼 두 다리로 걸을 수 있고, 작은 물체를 집어 올리고, 계단도 오를 수 있었다. 20년 간 비밀리에 진행된 프로젝트 결과가 공개되자 전 세계 로봇 공학자들은 ‘멘붕’에 빠졌다.
선진국들은 앞다퉈 휴머노이드 연구에 착수했다. 국내에도 오 교수가 연구를 시작했다. 오 교수팀은 2004년 아시모와 견줄 수 있는 수준의 성능을 갖춘 휴보를 개발했다. 2~3명의 연구자가 3년이 채 되지 않는 짧은 기간에 이룬 쾌거였다.

이후 연구팀은 휴보를 계속 업그레이드했다. 2005년 다양한 얼굴 표정과 더욱 복잡한 몸동작이 가능한 ‘알버트 휴보’를 개발했고, 2008년 시속 3.6km로 뛸 수 있고 몸을 흔들며 춤도 추는 ‘휴보II’를 개발했다. 2015년에는 휴보II보다 키가 크고 성능이 강화된 ‘DRC-휴보’로 미국 국방부 산하 방위고등연구계획국(DARPA)이 주최한 재난대응로봇 경연인 ‘다르파 로보틱스 챌린지(DRC)’에 나가 우승을 차지했다.
DRC-휴보는 머리에 최신 카메라와 레이저 스캐너를 장착해 상황에 따라 적합한 행동을 판단하는 기능이 뛰어났다. 정강이와 발밑에 바퀴도 달았다. 두 발로 걷다가 무릎을 꿇으면 자동차처럼 바퀴로 움직일 수 있도록 ‘변신 기능’을 추가한 것이다.
오 교수는 “휴머노이드가 움직일 때 관절마다 위치와 속도, 가속도가 모두 다르다”며 “어떤 조합이 가장 이상적인지, 어떤 조합이 에너지를 최소화하는지 수억 개의 조합을 계산해 그중 최선의 조합을 제시해야 로봇이 움직일 수 있다”고 설명했다. 그는 “로봇 공학자를 꿈꾼다면 수학과 물리학을 잘 해야 한다”고 덧붙였다.
휴보의 팔다리 기술 이용해 협동로봇 개발

오 교수는 현재 휴보에 적용한 기술을 토대로 인간과 상호작용할 수 있는 로봇을 개발하는 데 주력하고 있다. 그는 “로봇의 개념이 과거와 비교해 많이 달라졌다”며 “예전에는 인간의 형태를 닮은 로봇을 만드는 데 집중했는데, 지금은 인간의 기능을 더 완벽하게 수행하는 로봇으로 무게중심이 옮겨갔다”고 말했다.
이런 로봇을 구현하는 데 가장 중요한 기능은 두 가지다. 첫째는 팔, 다리, 바퀴 등 물리적인 움직임으로 결과를 만들어내는 ‘모빌리티(mobility·운동성)’ 기능이다. 둘째는 인간이 특정 작업을 입력 했을 때 스스로 판단해 작동하는 ‘오토노미(autonomy·자율성)’ 기능이다.
오 교수는 “휴보의 팔을 이용하면 커피를 만드는 협동로봇을 만들 수 있고, 휴보 다리에 바퀴를 달면 세그웨이가 된다”며 “휴머노이드에 집약된 로봇 기술이 다양한 기능의 로봇에 활용될 수 있다”고 말했다.
현재 오 교수팀은 휴머노이드 및 4족 보행 로봇뿐만 아니라, 휴보의 기술을 녹여내 인공지능(AI)을 기반으로 다양한 물체를 조작하고 도구를 활용할 수 있는 로봇팔 형태의 협동로봇을 개발하고 있다. 협동로봇은 여러 산업 현장에서 활약할 것으로 기대된다.
실제로 휴머노이드로봇연구센터 연구원들이 만든 로봇 벤처인 레인보우로보틱스는 고도의 로봇 관절 구동 기술을 이용해 로봇팔 모양의 협동로봇인 ‘RB3-1200’ ‘RB5-850’ ‘RB10-1300’ 등 ‘RB’ 시리즈를 제작해 2019년 판매를 시작했다. RB는 좁은 공간에서 물건을 들어 올리고, 용접이나 실링 등을 대신할 수 있다.
RB 뒤에 붙은 숫자는 가반하중(로봇이 들 수 있는 최대 무게)과 최대작업반경을 나타낸다. 가령 RB3-1200은 가반하중이 3kg, 최대작업반경이 1200mm라는 뜻이다.
● 세계와 경쟁 펼칠 우주로봇
“오오, 움직인다! 움직이는 거 맞죠?”
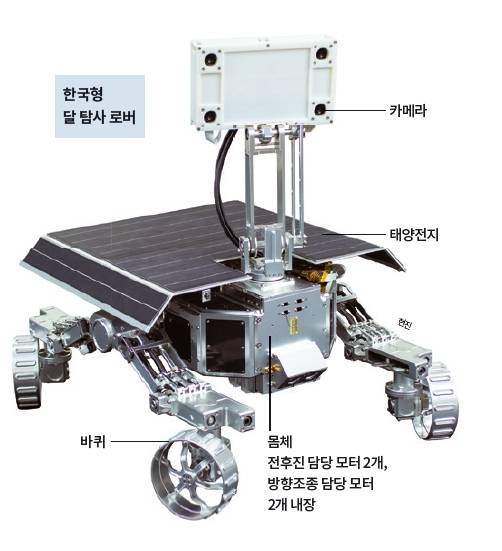
가로 50cm, 세로 70cm, 높이 40cm에 무게가 23kg인 로버(Rover)가 느린 속도로 서서히 앞으로 나아가기 시작했다. 한국과학기술연구원(KIST) 로봇미디어연구소가 개발 중인 한국형 달 탐사 로버다. 로버는 행성 표면을 주행하며 탐사하는 우주로봇을 말한다. 2030년 우리 정부가 처음으로 달 탐사에 나설 때 스포트라이트를 받을 ‘메이드 인 코리아’ 달 탐사 로봇이다. 12월 6일 한국형 달 탐사 로버의 첫 시연 현장은 기대감과 흥분으로 가득했다.
시속 0.14km로 움직이는 데 성공

“1초에 약 4cm 정도 움직이는데, 이 정도면 굉장히 빠른 속도입니다.”
한국형 달 탐사 로버 개발 책임자인 이우섭 KIST 로봇미디어연구소 책임연구원이 만족스러운 미소를 지으며 말했다. 그간 로버의 부품별로는 테스트를 많이 했지만, 로버의 구동을 종합적으로 테스트한 건 이날이 처음이었다.
로버는 빨리 움직이면 울퉁불퉁한 달 표면을 타고 넘다 넘어질 수 있다. 또 긴급 상황에서는 정지 명령을 내릴 시간을 확보해야 한다. 화성의 경우 메시지가 전달되는 데 약 14분이 걸린다. 그래서 시속 0.2km 이하로 천천히 움직이도록 설계해야 안전하다. 세계에서 가장 긴 거리를 이동한 미국항공우주국(NASA)의 화성 탐사 로버 ‘오퍼튜니티’도 최대 시속 0.18km로 11년 동안 고작 45.16km를 움직였다. 한국형 달 탐사 로버는 이보다 약간 느린 시속 0.14km로 움직인다.
시연 현장은 최대한 달 중력 환경을 구현했다. 로버는 천장에 달린 레일에서 내려온 줄에 몸체가 묶인 채 움직였다. 중력이 지구의 6분의 1인 달의 환경을 고려해 로버의 무게를 4kg 수준으로 줄인 효과를 내기 위해서였다. 한쪽 벽에는 대형 모니터 4개에서 로버가 전송한 메시지와 함께 로버의 상태와 위치, 로버에 달린 카메라가 비추는 화면 등이 실시간으로 중계됐다.
지구와 달 탐사 로버 간의 원격통신을 가정한 테스트도 처음 이뤄졌다. 가령 로버에게 전방 20m 앞 1시 방향에 있는 물체의 사진을 찍게 하려면 ‘move f 20 ; turn + r 30; take p’와 같은 통신 신호를 보내야 한다. 지구와 달 사이의 거리는 약 38만4400km로 멀기 때문에 신호를 여러 차례 전송한다.
로버는 반복된 메시지를 조합해 지시대로 행동한다. 로버에게 신호를 보낸 뒤 답을 받으려면 심우주 통신 시스템(DSN·Deep Space Network)을 이용해야 하기 때문에 시간이 많이 걸린다. 이날 연구팀은 달 탐사 로버에 원격으로 통신 신호를 보내고 원격으로 조종하는 데까지 성공했다.
화성보다 심한 달의 극한 환경
사실 달 탐사 로버는 화성 탐사 로버보다 더 극한 환경에서 임무를 수행한다. 화성은 대기가 있어 우주 방사선의 영향력이 상대적으로 적은 반면 달은 우주 방사선을 직격으로 맞는다. 때문에 내부 전자회로의 피복을 두껍게 만들고, 그 위를 납으로 감싸는 별도의 보호 장치를 제작해야 한다.
또 화성의 기온은 계절에 따라 영하 153도~영상 20도를 오간다. 반면 달은 하루에도 온도가 영하 170도에서 영상 127도까지 오르내리며, 이런 밤낮이 14일씩 지속된다. 때문에 열과 냉기를 모두 견딜 수 있도록 보온 장치와 온도제어장치가 필수적이다. 같은 기능의 탑재체를 싣더라도 크기와 무게가 늘어날 수밖에 없다.
이 책임연구원은 “우주에 나간 로버는 대부분 기계적 고장보다는 전기적 고장 때문에 문제가 생긴다”며 “로버에 들어가는 전자 부품의 수를 최대한 줄이기 위해 노력했다”고 설명했다.
한 예로 일반적인 우주 탐사 로버는 바퀴마다 전후진운동을 담당하는 모터와 방향조종을 담당하는 모터가 각각 달려있다. 고장의 위험이 있는 모터 8개가 외부 환경에 그대로 노출된 셈이다. 그러나 연구팀은 왼쪽 바퀴 두 개와 오른쪽 바퀴 두 개를 각각 함께 움직이도록 설계하고 여기에 필요한 전후진운동 담당 모터 2개, 방향조종 담당 모터 2개를 로버 몸속에 넣었다.
이 책임연구원은 “이렇게 설계하면 무게를 줄일 수 있을 뿐만 아니라 전자 부품에 오류가 발생할 확률이 낮다”고 설명했다.
달 탐사는 2000년대 들어 새롭게 주목받고 있다. 달을 화성이나 더 먼 심우주 탐사를 위한 일종의 정거장으로 보고 있기 때문이다. 현재 미국, 일본, 중국, 인도, 이스라엘 등 전 세계가 경쟁적으로 달 탐사를 계획하고 탐사선과 탐사 로봇 등을 개발하고 있다.
계획대로라면 한국형 달 탐사 로버는 2030년 한국 발사체에 실려 달 표면에 착륙한다. 앞으로 극한 조건에서의 테스트와 추가 개발이 남았지만, 이번 시연 성공으로 중요한 첫 발을 내딛었다.
이 책임연구원은 “세계적으로 달 탐사 경쟁이 치열한 만큼 우리나라도 한국형 달 탐사 로버에 이어 후속 기술을 계속 연구해야 한다”며 “현재는 후속 로버 개발 계획이 없는 만큼 지금이라도 우주 탐사 로봇 개발 계획을 중장기적으로 검토하고 만들 필요가 있다”고 강조했다.

● 인간 돕는 웨어러블 로봇
‘철컥, 척, 철컥, 척.’
로봇이 움직이는 육중한 소리가 연구실 문밖까지 새어 나왔다. 2020년 5월 스위스에서 열리는 ‘제2회 사이배슬론’ 대회를 위해 특별히 개발된 ‘워크온 슈트(WalkON Suit)’가 내는 소리였다.
사이배슬론은 신체 일부가 불편한 장애인들이 웨어러블 로봇과 같은 보행 보조 로봇을 착용하고 신체 기능을 겨루는 로봇공학올림픽이다. 공경철 KAIST 기계공학과 교수는 워크온 슈트를 개발해 2016년 제1회 사이배슬론 대회부터 참가하고 있다.
무게 30kg ‘워크온 슈트’ 개발

“로봇의 다리 힘이 대단히 세네요. 입어도 되는 거 맞죠?”
로봇의 움직임을 가까이에서 보려고 기자가 욕심을 부리다가 하마터면 무게가 30kg이나 되는 로봇과 충돌할 뻔했다.
현재 워크온 슈트와 같은 웨어러블 로봇은 크게 두 가지 목적으로 개발되고 있다. 하나는 군이나 산업 현장에서 병사나 직원이 무거운 물건을 들 때 강력한 힘을 내주기 위한 것이다. 다른 하나는 장애가 있는 사람들이 입었을 때 팔이나 다리 등의 근력을 강화해주는 보조 로봇이다. 같은 웨어러블 로봇이지만 종류에 따라 프로그래밍 방법이나 제어 원리가 완전히 다르다.
2000년대 초반까지만 해도 웨어러블 로봇은 투박하고 거대했다. 당시 로봇 연구자들은 착용자가 생각한 대로 움직이는 웨어러블 로봇을 만들고자 했다. 사람은 로봇에 ‘탑승’만 할 뿐 로봇이 주체가 돼 움직이는 웨어러블 로봇을 구상했다.
그런데 2010년을 기점으로 패러다임이 바뀌었다. 로봇은 사람의 뜻대로 행동하면서 도움만 주는 역할로 축소됐다. 이런 흐름에서 웨어러블 로봇은 점점 더 가볍고 착용 시 거부감이 느껴지지 않는 형태로 바뀌었다.
그렇다고 해서 결코 힘이 약한 것은 아니다. 워크온 슈트는 관절을 움직이는 힘이 150N/m2다. 이 정도면 젊은 남성의 하지 근력과 비슷한 수준이다. 특히 워크온 슈트는 단순히 걷거나 생활하는 용도가 아니라 스포츠 경기에 출전할 목적으로 만들어진 만큼 강력한 힘을 발휘할 수 있게 설계됐다.
분당 25m 보행, 내년 대회 금메달 목표

“처음에는 많이 두려웠죠.”
워크온 슈트를 착용하고 제1회 사이배슬론 대회에 출전해 동메달을 딴 김병욱 씨는 웨어러블 로봇이 처음부터 익숙했던 것은 아니라고 말했다. 1998년 뺑소니 사고를 당해 하지완전장애 판정을 받은 그는 2015년 연세대 세브란스병원 재활의료팀을 통해 사이배슬론 대회에 참가할 선수를 모집한다는 얘기를 듣고 공 교수를 찾아왔다.
처음에 장비를 착용했을 때는 웨어러블 로봇을 믿지 못했다고. 로봇의 반응이 늦어 혹시라도 고꾸라지면 더 크게 다치진 않을까 두려웠던 것이다. 하지만 웨어러블 로봇의 도움을 받아 다시 걸을 수 있다는 희망으로 이런 두려움을 극복했고, 결국 대회에서도 높은 성적을 거뒀다.
하지만 공 교수는 지난 대회를 여전히 아쉬워했다. 가장 기본적인 자세인 ‘서 있기’가 불안정하게 설계돼 평소 기량을 다 보여주지 못했다는 것이다. 그는 “2020년 대회를 위해 사용자의 착용감과 제어의 편의성을 보완했다”고 설명했다.
가장 큰 변화는 발목 부분이다. 발목은 몸의 무게중심이 되는 배꼽 근처에서 멀고, 동작이 많아 가벼우면서도 큰 힘을 내야 한다. 공 교수는 사람 근육의 움직임과 동작을 본 따 웨어러블 로봇에 스프링 역할을 하는 탄성체 구조를 넣었다. 그 결과 기존 로봇보다 걸음이 자연스러워졌을 뿐 아니라 보행 속도가 빨라졌다. 현재 워크온 슈트는 1분에 25m까지 걸을 수 있다. 세계 최고 기록인 분당 21m보다 빠르다.
신체의 변화와 위험도를 파악할 수 있는 인공지능(AI) 알고리즘도 적용했다. 덕분에 연속 보행 모드를 시작하면 로봇이 스스로 걸을 수 있다. 김 씨는 “워크온 슈트로 2020년 제 2회 사이배슬론 대회에서 금메달을 따는 것이 목표”라고 말했다. 현재 김 씨를 포함한 남녀 선수 5명이 사이배슬론 출전권을 얻기 위해 KAIST 등 전국에서 훈련 중이다.
대학을 졸업한 뒤 17년째 로봇을 연구하고 있다는 공 교수는 “앞으로도 장애인과 비장애인이 구분되지 않는 세상을 위해 로봇 연구를 계속할 예정”이라고 말했다. 그의 꿈은 크다. 웨어러블 로봇을 신체에 완벽히 숨겨 장애가 드러나지 않게 하고 싶다. 또 웨어러블 로봇을 패션처럼 착용할 수 있게 만들고도 싶다. 언제쯤 이런 시대가 올까.
“보통 하나의 기술이 온전히 자리 잡는 데 30년 정도 걸린다고 예상하잖아요. 15년쯤 지나면 지금 과학동아 독자들 가운데 중·고등학생은 대학과 대학원까지 마치고 로봇공학자가 된 친구들도 있지 않을까요. 그 즈음에는 충분히 제가 예상하는 세상이 올 것 같습니다.”
※관련기사 과학동아 2020년 1월, [특집] 1920-2020 로봇 레볼루션
[조혜인 기자 heynism@donga.com]
Copyright © 동아사이언스. 무단전재 및 재배포 금지.