NXT로 익히는 로봇팔의 구조
[쇼핑저널 버즈]
|
|

주변의 산업현장에서 사람을 도와주는 많은 로봇을 볼 수 있다. 겉모양과 기능은 사람과 다르지만 많은 분야에서 사람들이 하기 힘든 일과 위험한 일을 대신해주고 있다. 그중에서 사람의 팔과 같은 역할을 하는 로봇팔을 디자인하고 실제로 만들어 보자.
여기서 제작하는 로봇은 집게 부분, 팔 부분, 몸통 부분으로 구성되며 각 부분이 서로 유기적으로 연결되어 있으므로 어느 한 부분이라도 틀리지 않도록 주의해야 한다.
집게 부분
|
|

집게는 손가락과 같이 물건을 잡도록 하는 부분이다. 집게를 구성하는 방법은 갖가지이지만 작업에 필요한 용도에 맞도록 집게를 구성한다. 집게의 원리는 여러 가지가 있는데 여기서는 기어를 이용한 방법을 사용한다.
팔 부분
|
|

팔 부분은 평행사변형의 구조로 되어 있다. 평행사변형의 움직임에 따라 팔을 위아래로 움직이는 구조로 제작할 수 있다. 평행사변형과 기어의 움직임을 이용하여 로봇팔을 상하로 움직이는 구조를 만들 수 있다. 특히 이 구조는 상하로 움직이는 구조가 정확하게 제한된다.
몸통 부분
|
|

기어는 다양한 기어비를 이용하여 감속구조나 가속구조를 제작할 수 있다. 감속구조의 경우 느리지만 힘이 좋아지므로 무거운 물체를 움직일 때 사용한다. 몸통의 경우 윔기어를 이용하여 윔기어가 한 바퀴 도는 동안 56t(teeth) 기어의 1t만큼 움직이는 감속구조로 상부구조의 무게를 지탱하고 움직일 만큼 충분한 힘을 얻을 수 있다.
로봇팔 완성
|
|

수동으로 로봇팔의 각 부분을 움직여 보면서 실제 동작 여부와 구동 원리를 알아보고 여러 물체를 잡아본다. 점검이 끝나면 NXT 프로그램을 이용하여 로봇팔을 움직여본다.
로봇팔 좌우로 움직이기
|
|

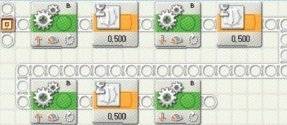
모터를 이용해 좌우로 움직이는 프로그램을 작성한다.
윔기어7바퀴=45도14바퀴=90도28바퀴=180도56바퀴=360도 |
좌우 이동은 윔기어를 사용한 감속기어이므로 기어비는 1:56으로 모터 14바퀴가 실제 로봇팔의 1/4(90도) 바퀴의 움직임을 나타낸다.
|
|

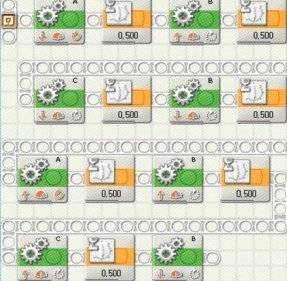
로봇팔 상하로 움직이기모터를 이용하여 상하로 움직이는 프로그램을 작성한다. 상하 이동에 사용한 기어는 한 기어를 고정하고 다른 기어의 주변으로 이동시키는 방식으로 중간 상태에서 최상위, 최하위는 각 모터의 한 바퀴 움직임을 나타내며 사다리꼴 구조는 최상위와 최하위에서 움직이지 않도록 해준다.
|
|
복잡한 움직임 실행하기앞에서 한 활동을 기본으로 다음과 같이 복합적인 움직임을 할 수 있도록 프로그램을 작성해본다.
1) 로봇팔을 90도로 회전시킨다.2) 로봇팔을 바닥까지 내린다.3) 집게를 이용하여 물건을 집는다.4) 로봇팔을 중간 정도로 올린다.5) 로봇팔을 오른쪽으로 90도 회전시킨다.6) 로봇팔을 바닥까지 내린다.7) 집게를 벌려 물건을 내려놓는다.8) 로봇팔을 중간 정도까지 올린다.
|
|
[ 관련기사 ]▶ 로보빌더 모션 척척 '모션빌더·액션빌더'▶ 실용 로봇 앞당긴다, 대구경북과학기술원▶ 나도 로봇이야!▶ 네트워크 유아교육로봇 '유진로봇 아이로비큐'월간로봇(www.jejisa.kr)'IT 제품의 모든것'-Copyright ⓒ ebuzz.co.kr, 무단전재 및 재배포 금지
Copyright © 전자신문. 무단전재 및 재배포 금지.
- 활어가 죽은 듯 잠든 이유?…中 CCTV, 수산시장 무허가 마취약 적발
- 트럼프 “이란과 중동전쟁 해결 위한 생산적 대화”…발전소 공격 5일 유예
- 낙태약 먹은 美 여성, 살인 혐의 기소 위기… 임신중절이 '살인죄' 될까
- “손길로 치유한다더니”… 경계 모호한 中 '밀착 터치 테라피'에 찬반 논란
- LG화학, 여수 2공장 가동 중단…나프타 수급 차질 영향
- 역대 최고 실적인데…삼성바이오 파업 시계 돌아가나
- 신원근 카카오페이 대표, 재신임…AI·디지털자산 본격화
- [국방 AX 골든타임]〈상〉“AI가 표적 결정”…이란戰서 확인된 'AI 참모' 위력
- 'NAS계 애플' 시놀로지 “韓, 2029년까지 매출 2배 성장 자신”
- KIET, “석유 최고가격제, 단기처방으론 유효”